- Autonomous Flight, Deterministic Computing
The Safety Questions Autonomous Flight
Still Can’t Answer And
Why DAIOS Can
Six safety threats regulators care about and
how deterministic authority resolves them
Autonomous flight is no longer being evaluated on whether it works in ideal conditions. It is being evaluated on how it behaves when conditions are uncertain, degraded, or contested. Across FAA, EASA, FCC, DOT, and NHTSA reviews, the same categories of concern surface again and again: collision avoidance in shared airspace, sensor and weather degradation, system and power failures, AI decision limits and edge cases, cybersecurity and control integrity, and the human and public trust implications of autonomy at scale. These are often discussed as separate technical problems, but regulators treat them as variations of a single question. Can the system be guaranteed to refuse action when it should not act. This article walks through each of these six safety threats from the regulator’s point of view and explains how DAIOS resolves them by enforcing deterministic authority before execution. The first and most immediate of these concerns is collision avoidance and airspace integration, where uncertainty and density expose the limits of autonomy without enforceable permission boundaries.
Throughout this article, all autonomous behavior is evaluated under the Deterministic Ethical Constraint Transition Law (DECTL).
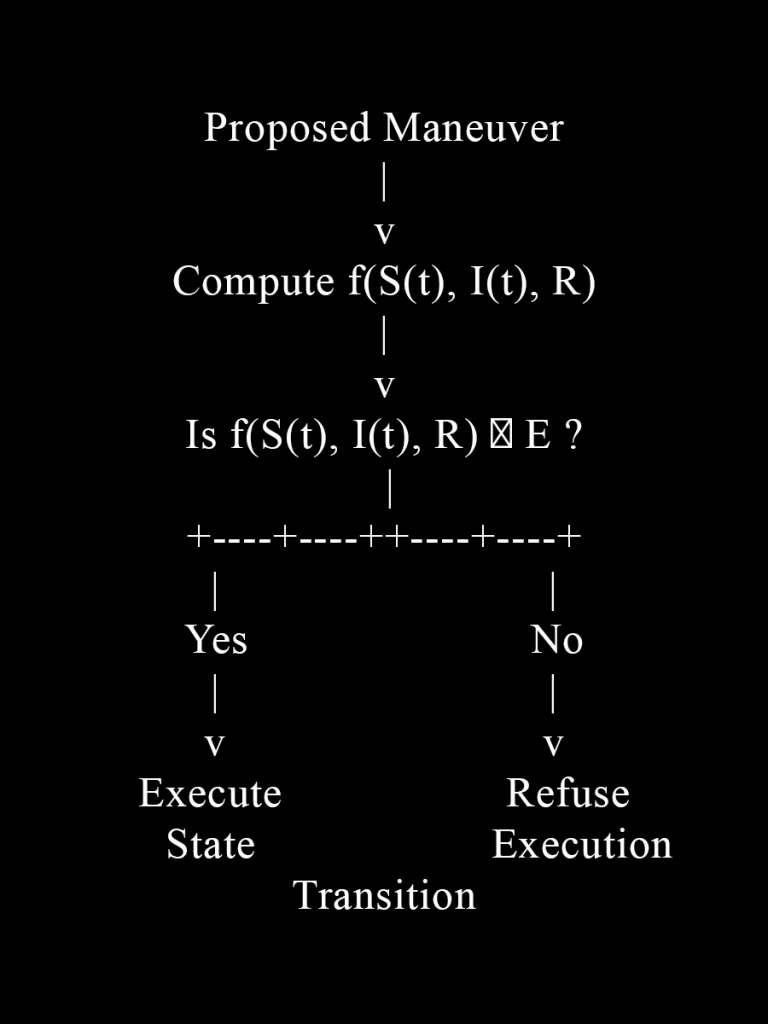
S(t+1) = f(S(t), I(t), R, E)
with the requirement that:
f(S(t), I(t), R) ∈ E
Where:
S(t): The complete system state at the current moment.
I(t): All inputs available at that moment, including sensors, environment, traffic, and system health.
R: The governing rules, including operational constraints, safety limits, and regulatory requirements.E: The ethics and safety envelope defining which system states are permitted.
A transition is only allowed if the computed next state remains inside E. If it cannot be proven to do so, the transition is refused and no execution occurs.
Patent reference: The Deterministic Ethical Constraint Transition Law and the described deterministic authority architecture are covered by a U.S. non-provisional patent application filed Nov. 25, 2025 (Application No. 19/400,020), with priority dating to April 2025.
COLLISION AVOIDANCE AND AIRSPACE
INTEGRATION IN AUTONOMOUS FLIGHT
Collision avoidance and airspace integration are the first issues raised in nearly every autonomous flight safety review. Aircraft are being introduced into airspace that is already crowded, mixed, and constrained, especially at low altitude where drones, helicopters, buildings, birds, and people all coexist. From the FAA, EASA, and DOT perspective, the problem is not whether an autonomous system can detect potential conflicts. The problem is whether the system has a provable limit on when it is allowed to maneuver in response to those conflicts.
A common scenario illustrates the concern. An autonomous aircraft operating in an urban corridor detects converging traffic while flying near buildings. Vision sensors are partially degraded by glare or weather. Traffic data is delayed or incomplete. The system still has enough information to propose an evasive maneuver, but not enough to prove that the maneuver preserves separation, remains within permitted corridors, and does not increase risk to people on the ground. These are not rare edge cases. They are normal operating conditions in real airspace.
Under DAIOS, this situation is evaluated through the Deterministic Ethical Constraint Transition Law. The proposed maneuver is treated as a candidate transition from S(t) to S(t+1). If the transition computed by f(S(t), I(t), R) cannot be shown to remain inside the admissible envelope E, the maneuver is not authorized. Degraded inputs change I(t). That change alone may be sufficient to make the transition non-admissible. When admissibility cannot be proven, execution is refused.
This is why regulators increasingly view deconfliction failures as permission failures rather than perception failures. Sensors will misinterpret. Weather will degrade visibility. Traffic awareness will never be perfect. What matters is whether the system is guaranteed to withhold authority under those conditions. An autonomous aircraft that refuses to maneuver when admissibility cannot be proven is behaving safely, even if it appears conservative.
For airspace integration, this distinction is critical. Shared airspace only works when every participant has enforceable boundaries on behavior. DAIOS provides that boundary by ensuring that uncertainty removes permission rather than quietly lowering confidence thresholds. For the public, the logic is intuitive. A system that pauses or refuses when the situation is unclear is more trustworthy than one that moves decisively based on an estimate. That principle is foundational to integrating autonomous aircraft safely into shared airspace at scale.
In controlled prototype evaluations focused on collision avoidance under degraded sensor input and ambiguous traffic conditions, DAIOS refused execution whenever admissibility could not be proven. Within the evaluated test scope, this resulted in zero unauthorized state transitions, even when conventional probabilistic logic would have proposed a maneuver.
SENSOR FAILURE, WEATHER DEGRADATION, AND
STATE AMBIGUITY IN AUTONOMOUS FLIGHT
Sensor failure and weather degradation are among the most well-understood risks in aviation, and regulators already assume they will occur. Rain, fog, snow, sun glare, signal dropouts, and partial occlusion routinely degrade perception systems. From the FAA and EASA perspective, the existence of sensor error is not the unresolved issue. The unresolved issue is what an autonomous system is permitted to do when its view of the world is incomplete or contradictory.
Precedent from NHTSA crash investigations in ground autonomy reinforces this concern. In multiple cases, systems continued to act on misinterpreted sensor input, not because the sensors failed silently, but because the system was still allowed to execute decisions when state understanding was wrong. These incidents did not hinge on exotic edge cases. They resulted from ordinary perception uncertainty combined with implicit permission to act. Regulators see the same structural risk emerging in autonomous flight.
A representative aviation scenario makes this concrete. An autonomous aircraft encounters fog or heavy precipitation that partially degrades vision and lidar returns. Navigation remains nominal. Control systems are healthy. The system still produces a plausible interpretation of its surroundings and proposes a maneuver. However, the degraded sensor input alters I(t) in a way that prevents the system from proving that the resulting state transition is lawful under separation, ground risk, or airspace constraints in R. Under DAIOS, that change alone is sufficient to remove permission.
Using the Deterministic Ethical Constraint Transition Law, the proposed maneuver is evaluated as a candidate transition. If f(S(t), I(t), R) cannot be shown to remain within the admissible envelope E due to sensor ambiguity, the transition is refused. The aircraft does not attempt to compensate by guessing, interpolating, or lowering thresholds. It does not continue operating on partial confidence. Lack of proof of admissibility results in no execution.
This behavior aligns directly with regulator expectations. FAA and EASA reviews focus on whether unsafe motion can be prevented under degraded conditions, not on whether perception can be perfected. DAIOS ensures that sensor uncertainty removes authority rather than quietly increasing risk. For public trust, the outcome is intuitive. People already accept that computers make mistakes. What they do not accept is a system that continues to act when it cannot be sure it is allowed to do so.
SYSTEM FAILURES, POWER EVENTS, AND
FAIL-CLOSED SAFETY IN AUTONOMOUS FLIGHT
System failures and power events remain leading contributors to serious aviation accidents, as reflected in decades of general aviation and rotorcraft loss-of-control statistics. Regulators at the FAA, EASA, and DOT are well aware that components will fail. Batteries will degrade. Actuators will misbehave. Inertial sensors will drift or drop out. The unresolved safety question is not whether failures occur, but whether an autonomous system is allowed to continue executing when critical parts of its state can no longer be trusted.
A recurring concern in both legacy and emerging aircraft is the assumption that redundancy alone provides safety. Multiple sensors, backup controllers, or alternate power paths can improve resilience, but they do not by themselves prevent unsafe execution. A system can remain technically operational while no longer being in a legitimate state to act. From a regulatory standpoint, graceful degradation that continues motion under uncertainty is not a safety guarantee. What is required is fail-closed behavior that removes authority when admissibility cannot be proven.
A representative scenario highlights the risk. An autonomous aircraft experiences a partial power event or a fault in an inertial measurement unit while operating over a populated area. Flight control remains responsive, and redundancy masks the failure at the control layer. The system can still propose maneuvers to maintain flight or adjust trajectory. However, the failure alters S(t) and degrades the integrity of I(t) in a way that prevents the system from proving that continued maneuvering satisfies operational limits, vehicle constraints, or ground-risk rules in R.
Under DAIOS, this situation is governed explicitly. The proposed continuation of flight or corrective maneuver is evaluated as a candidate transition. If the transition computed from the degraded state cannot be shown to remain within the admissible envelope E, execution is refused. The system does not attempt to “fly through” the failure on the assumption that redundancy is sufficient. Authority is removed precisely because the system can no longer prove that the next state is lawful.
This approach aligns directly with regulator expectations around fail-closed design. FAA and EASA certification philosophies prioritize preventing unsafe execution over preserving functionality. DOT concerns amplify this requirement when failures occur over people and infrastructure, where the consequences are immediate and visible. For public trust, the distinction is stark. A system that halts or constrains itself under failure is far more acceptable than one that continues operating until a catastrophic outcome makes the failure undeniable.

AI DECISION LIMITS, EDGE CASES, AND
NON-DETERMINISM IN AUTONOMOUS FLIGHT
AI decision limits and so-called edge cases remain a central obstacle to certifying autonomous flight. Regulators at the FAA, EASA, and DOT consistently emphasize that they are not in the business of certifying intelligence or model performance. They are tasked with certifying systems whose behavior is deterministic, repeatable, and traceable under defined conditions. When autonomous behavior cannot be reproduced or explained in terms of authority, certification stalls.
Precedent from NHTSA investigations in ground autonomy illustrates why this concern persists. In multiple cases, identical or near-identical conditions produced different system behaviors, making it impossible to establish a consistent chain of responsibility. These findings did not hinge on whether the system’s decisions were “reasonable” in hindsight. They hinged on the inability to prove why the system was allowed to act in one instance and not another. Non-repeatability undermines accountability.
A representative aviation scenario makes the risk concrete. An autonomous aircraft encounters an unusual traffic pattern or a rapidly evolving operational context that was not fully represented during development or testing. The AI system generates a plausible response based on learned behavior, but small variations in input timing or internal state lead to different proposed actions across otherwise similar situations. From a governance perspective, the system’s authority to act becomes ambiguous. There is no stable basis for proving that the same conditions will yield the same outcome.
DAIOS resolves this by separating inference from authority and enforcing determinism at the point of execution. AI systems may continue to generate proposals under uncertainty, but those proposals are treated as candidate transitions subject to the Deterministic Ethical Constraint Transition Law. If a proposed transition from S(t) cannot be shown to produce a lawful S(t+1) within the admissible envelope E under the governing rules R, execution is refused. The authority decision itself is deterministic, regardless of how variable the inference process may be.
This distinction is what regulators are asking for when they emphasize repeatability and traceability. They do not need to certify how an AI reasons internally. They need to verify that authority decisions are consistent, auditable, and replayable. By ensuring that only admissible state transitions can occur and that refusal is guaranteed when admissibility cannot be proven, DAIOS closes the accountability gap that fuels black-box fear and enables meaningful oversight of autonomous flight systems.
CYBERSECURITY, RF DEPENDENCE, AND
CONTROL INTEGRITY IN AUTONOMOUS FLIGHT
Cybersecurity and control integrity are often discussed as technical security problems, but regulators view them primarily through the lens of authority. The FCC, FAA, and DOT are less concerned with whether interference, spoofing, or signal degradation can occur. They assume it will. The safety question is whether the presence, absence, or manipulation of a radio signal can ever silently grant permission for an autonomous system to act.
Precedent makes this concern concrete. GNSS spoofing demonstrations and documented unmanned aircraft incidents have shown that navigation and command inputs can be delayed, distorted, or falsified without immediately disabling a system. In many cases, the system continues to operate because it still receives inputs that appear valid enough to support execution. From a regulatory standpoint, this is the failure. RF presence, even degraded or malicious, must never become a substitute for authority.
A representative scenario illustrates the risk. An autonomous aircraft operating beyond visual line of sight experiences partial GNSS spoofing or intermittent command link degradation. The system still receives position data and control signals, but their integrity can no longer be verified. Under conventional architectures, the aircraft may continue to maneuver based on confidence estimates or fallback logic, effectively allowing external signals to drive execution under uncertainty.
Under DAIOS, this situation is governed explicitly. External communications and navigation signals are treated as inputs I(t), not as sources of authority. If signal integrity cannot be proven, that condition alters I(t) in a way that prevents the system from demonstrating that the next state transition remains within the admissible envelope E under the governing rules R. When admissibility cannot be proven, execution is refused. The aircraft does not continue operating simply because a signal exists.
This approach directly addresses regulator concerns about hijacking and loss of control. Authority remains local, deterministic, and independent of external communication quality. For oversight bodies, this makes RF interference a bounded safety condition rather than an open-ended execution risk. For public trust, the outcome is straightforward. A system that refuses to act when it cannot verify control integrity is far more acceptable than one that continues moving based on compromised inputs.
HUMAN AUTHORITY, PUBLIC SAFETY, AND SOCIAL LICENSE TO OPERATE IN AUTONOMOUS FLIGHT
Human authority and public safety ultimately determine whether autonomous flight is allowed to scale at all. Even when technical requirements are met, deployment stalls if responsibility and control are unclear. Regulators at the FAA, EASA, and DOT recognize this, but public trust functions as a parallel authority. If people cannot understand who is in charge, when a system will refuse to act, and how unsafe behavior is prevented, acceptance erodes quickly.
Precedent across transportation domains shows the risk. Human-automation supervision failures repeatedly occur when control transitions are ambiguous. Operators assume the system is handling a situation. The system assumes the human will intervene. In the gap between those assumptions, unsafe behavior persists longer than it should. These failures are not caused by lack of capability. They are caused by unclear authority boundaries.
A representative autonomous flight scenario highlights the issue. An optionally piloted or remotely supervised aircraft encounters a developing hazard. The system continues operating because it has not explicitly lost permission to act. The human supervisor delays intervention because the system appears to be in control. No single moment clearly transfers authority, and unsafe behavior continues longer than intended. From a public perspective, it is impossible to explain who was responsible at that moment.
DAIOS resolves this by making authority explicit, local, and deterministic. Human input, supervisory commands, and autonomy proposals are all treated as inputs I(t). None of them grant execution authority by default. A transition only occurs if the resulting state is admissible under the governing rules R and remains inside the envelope E. When conditions change, authority is recalculated immediately. If admissibility cannot be proven, execution is refused regardless of whether a human or machine proposed the action.
This removes ambiguity at the boundary between human and autonomous control. Authority is never assumed, implied, or inherited. It is computed. For regulators, this makes responsibility traceable and enforceable. For the public, the behavior aligns with intuition. Systems that stop or refuse when responsibility is unclear are trusted more than systems that continue operating smoothly until something goes wrong. Social license to operate is not earned through promises of performance. It is earned through visible, provable refusal when action is not clearly allowed.
Autonomous flight has not stalled because the technology lacks intelligence or capability. It has stalled because authority has remained implicit. Across collision avoidance, sensor degradation, system failures, AI variability, cybersecurity, and human supervision, the same issue appears in different forms. Systems are allowed to act when they cannot prove they should. Regulators have been consistent on this point, even when it is expressed through different technical concerns.
The shift introduced by DAIOS is structural rather than incremental. It reframes safety around admissible state transitions instead of predicted outcomes. By enforcing deterministic authority before execution, unsafe behavior is prevented rather than explained after the fact. Refusal under uncertainty becomes a correct and expected outcome, not a failure mode to be optimized away. Prototype evaluations demonstrate that this refusal behavior is deterministic and repeatable under degraded conditions within the tested scope.
This approach aligns the needs of oversight bodies and the expectations of the public. Regulators gain a certifiable boundary on behavior that is repeatable, auditable, and independent of model internals. The public gains systems that pause or refuse when conditions are unclear, rather than systems that continue operating based on confidence alone. In both cases, trust is built on constraint, not performance claims.
Autonomous flight becomes viable at scale when systems are designed to prove permission, not just competence. By making authority explicit and deterministic, DAIOS addresses the safety questions that have held autonomy back and provides a foundation regulators can approve and communities can accept.

TL;DR
Autonomous flight is being blocked not by lack of capability, but by the inability to prove when systems must refuse to act. DAIOS resolves this by enforcing deterministic authority so actions occur only when the next state is provably admissible under safety, legal, and ethical constraints.